
北京清华长庚医院3月19日电(供稿 骨科与运动医学中心)后交叉韧带(PCL)是维持膝关节后方稳定性的重要结构,包括前外侧束(ALB)与后内侧束(PMB)(图1),相比传统的单束重建,双束重建能更精确地模拟PCL原有的解剖结构和生物力学功能,但双束重建面临止点辨识模糊、隧道精准度与防融合要求高、后方高危结构暴露等难点,亟需开发更加精准高效的干预策略。
在此背景下,近日,清华大学北京清华长庚医院骨科与运动医学中心主任余家阔团队自主研发了运动医学全能重建手术机器人系统,本研究在全球范围内首次成功实现了基于CT与MRI多模态影像融合的机器人辅助手术系统在骨科领域的深度应用,实现机器人辅助下后交叉韧带双束重建术,为实现更精准的后交叉韧带双束重建提供了新的解决方案,开创性地达成了术者与智能系统之间的实时人机协同操控。
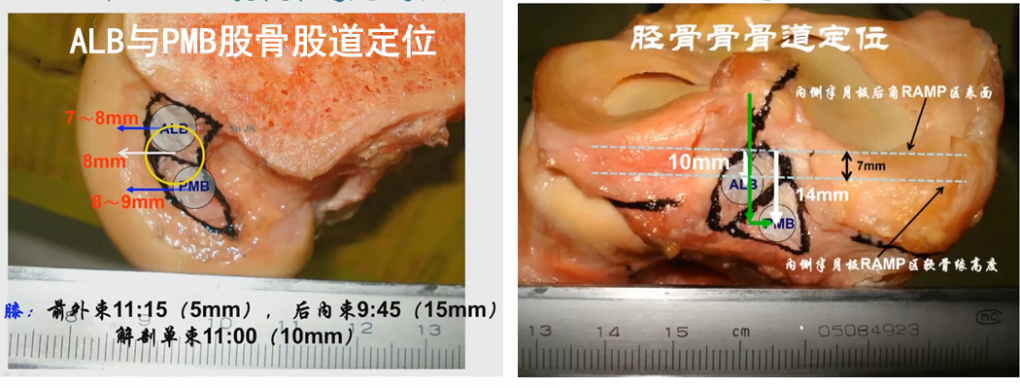
图1、后交叉韧带的前外侧束(ALB)与后内侧束(PMB)股骨及胫骨定位
继2024年12月4日全球率先开展机器人辅助前交叉韧带双束重建之后,今年1月26日,余家阔团队在北京清华长庚医院成功完成了全球首例机器人辅助下后交叉韧带双束重建术。在手术过程中,机器人系统不仅提供高灵敏度的实时力觉反馈,还集成了精准的视觉导航模块,使得整体操作精度(误差范围)被严格控制在亚毫米级别,并小于0.5毫米。
基于此高精度平台,团队成功在精准导航下分别用机器人钻取股骨的ALB和PMB的两个独立骨隧道,以及胫骨的ALB和PMB的两个独立骨隧道,在上述骨道的机器人钻取中,精准导航和力反馈安全保障的赋能,规避了腘动脉、腘静脉、胫神经等后交叉韧带(PCL)毗邻的关键神经血管结构,提升了手术的安全性与解剖还原度(图2),还大大缩短了手术时间,为患者重返运动奠定了基础。
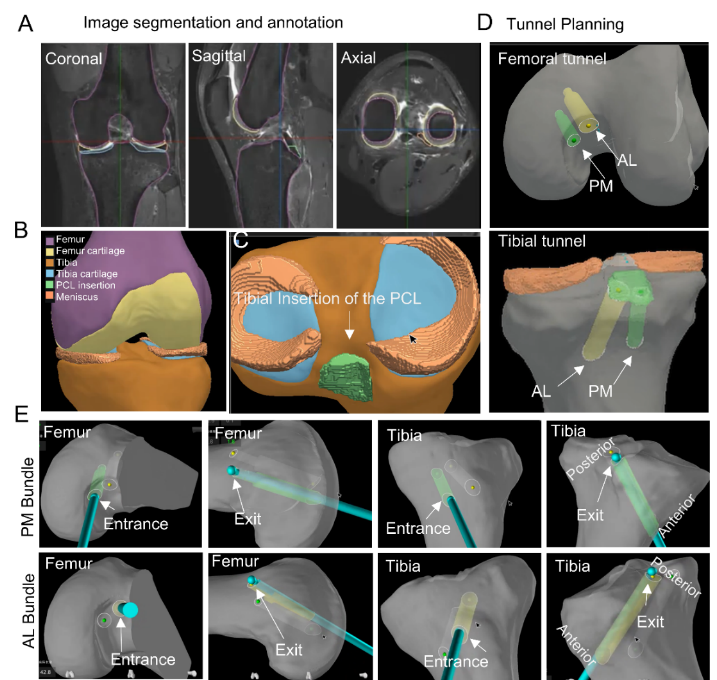
图2、机器人辅助下后交叉韧带双束重建术
术中实时导航系统与术后影像学评估结果均证实,手术效果与术前规划高度吻合:所有骨隧道均精确定位于预定解剖止点区域,重建韧带的形态学结构及张力状态均达到理想标准,膝关节后向稳定性亦获得可靠恢复(图3)。
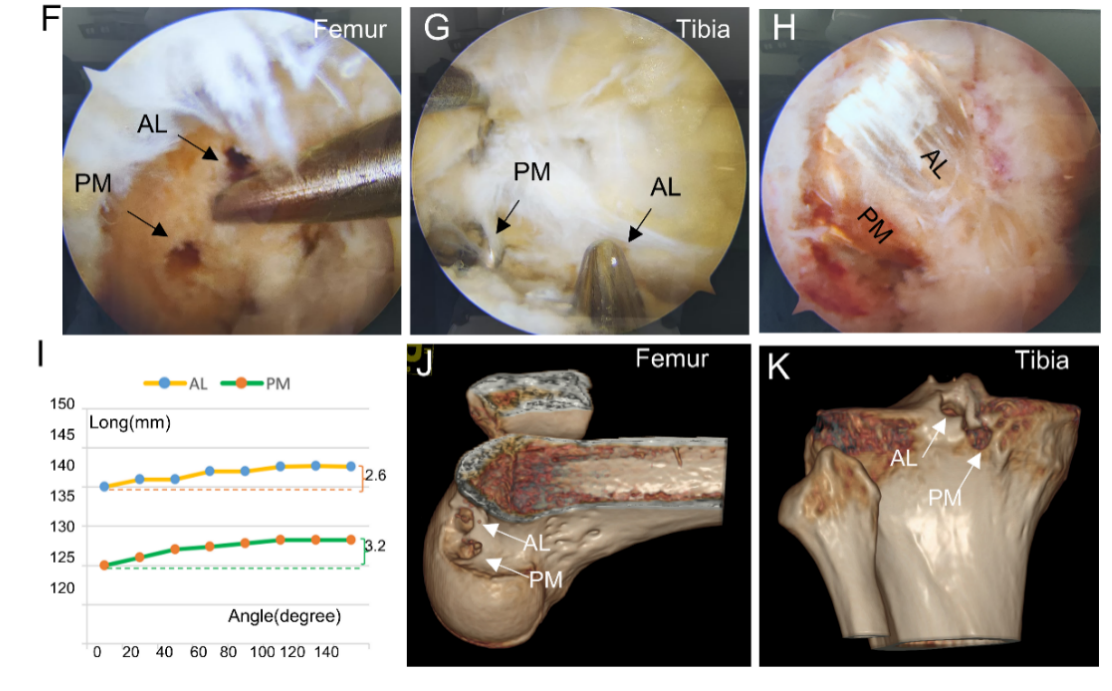
图3、机器人辅助下后交叉韧带双束重建术中及术后验证
此项技术标志着骨科与运动医学韧带重建手术方式的范式性转变——通过实现亚毫米级的动态实时定位与智能引导,将后交叉韧带(PCL)解剖止点的重建流程,从传统依赖“经验估算”的操作模式,精准带入“数字导航”与智能协同的新时代。这一突破极大提升了手术操作的精确性与临床可重复性,也为骨科手术迈向更加精准化、个性化和智能化的未来奠定了坚实技术基础,开启了智能精准骨科的全新篇章。
相关研究成果以A novel approach to double-bundle posterior cruciate ligament reconstruction: leveraging individualized robotic navigation and multimodal imaging for superior precision and feasibility(《基于个体化机器人导航与多模态成像的后交叉韧带双束重建更准确可行》)为题,发表于International Journal of Surgery(《国际外科学杂志》)。余家阔为本文通讯作者,北京清华长庚医院骨科与运动医学中心主治医师孙义峰为第一作者,该工作获得北京市科技项目支持。

北京清华长庚医院APP
快速挂号